Semiconductor chips are in everything — phones, cars, medical devices
During manufacturing, silicon wafers go through hundreds of process steps
Defects on the wafer surface cause chip failures
Traditional inspection: manual review by engineers — slow, subjective, expensive
Our goal: automate defect pattern recognition using deep learning
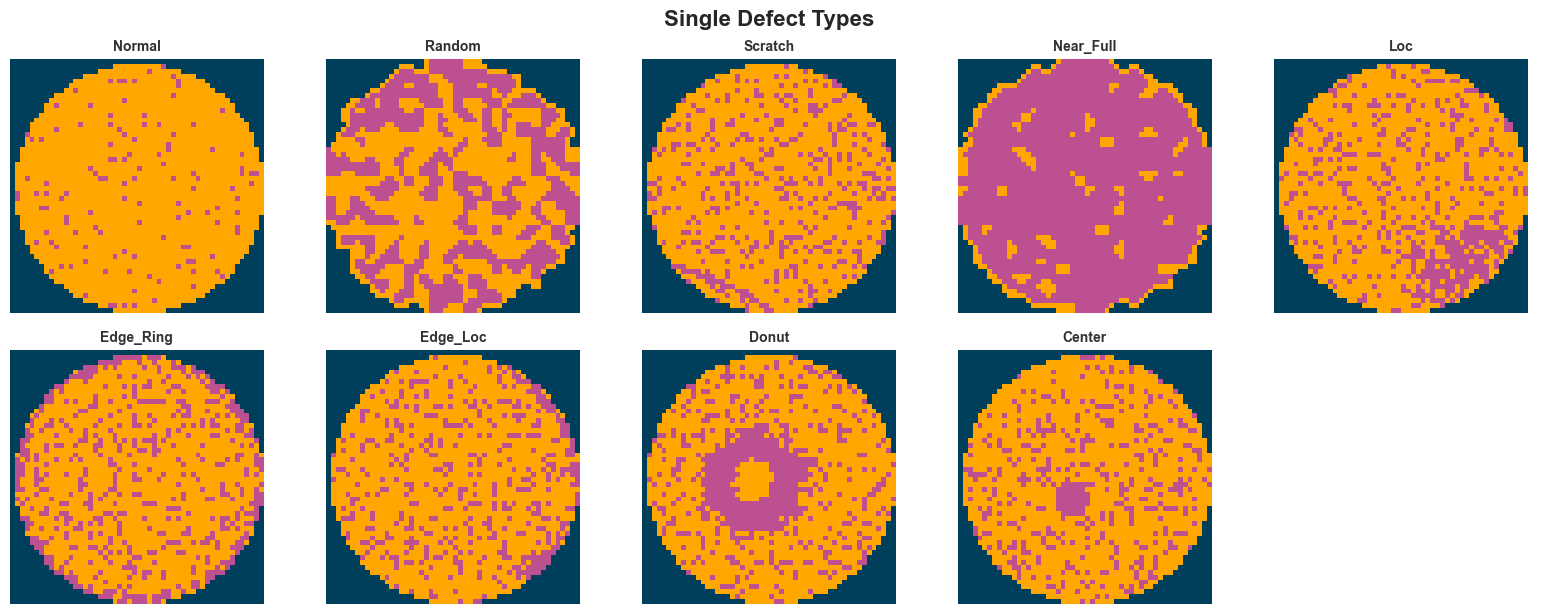
The 8 Base Defect Types
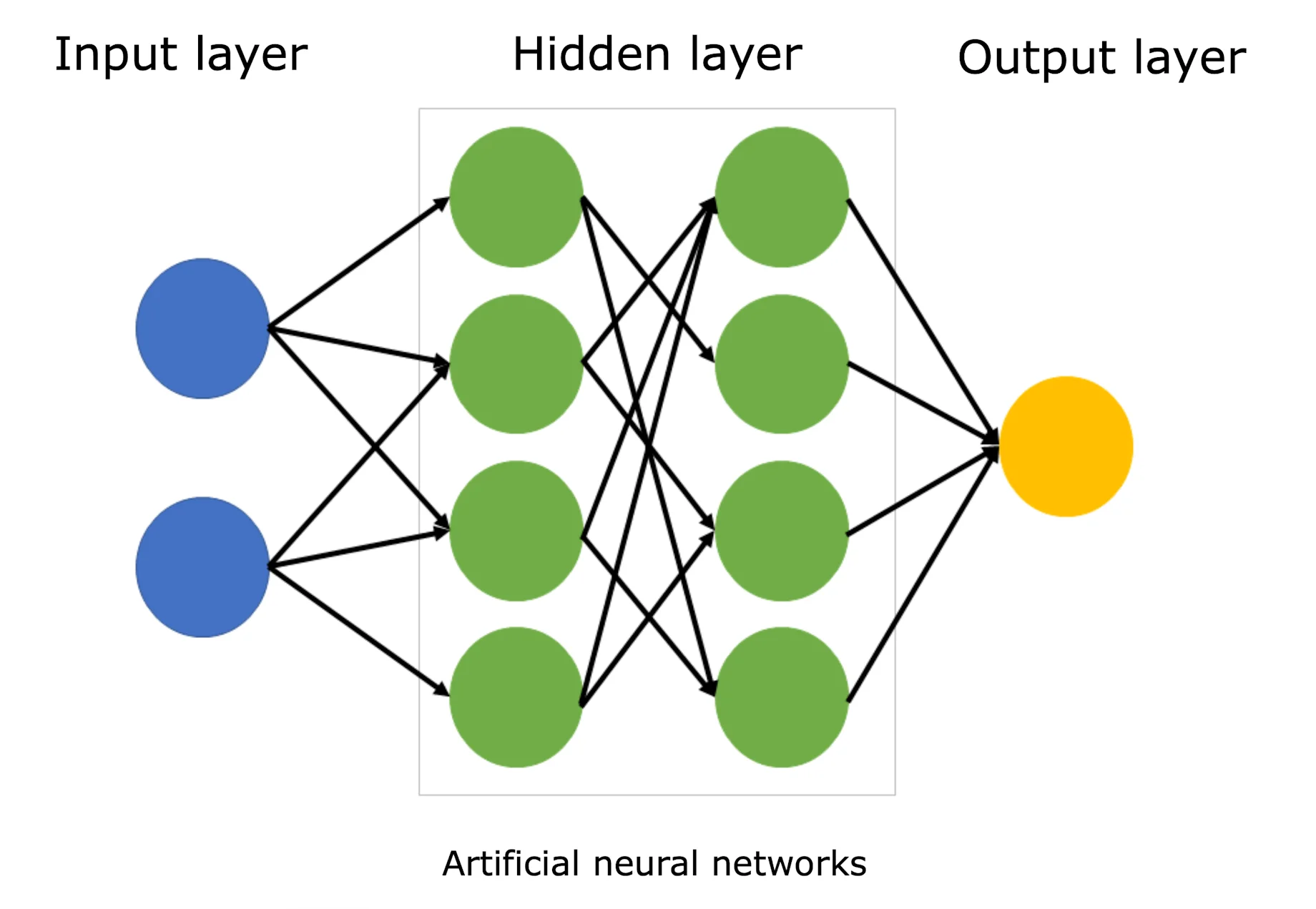
What is a Neural Network?
Think of it as a decision-making system inspired by the brain:
Inputs: Raw data (e.g., pixel values of a wafer image)
Hidden layers: Each layer learns to detect increasingly complex patterns
Output: A prediction (e.g., “this wafer has a scratch defect”)
The network learns by example — we show it thousands of labeled wafer images, and it figures out what patterns correspond to each defect type.
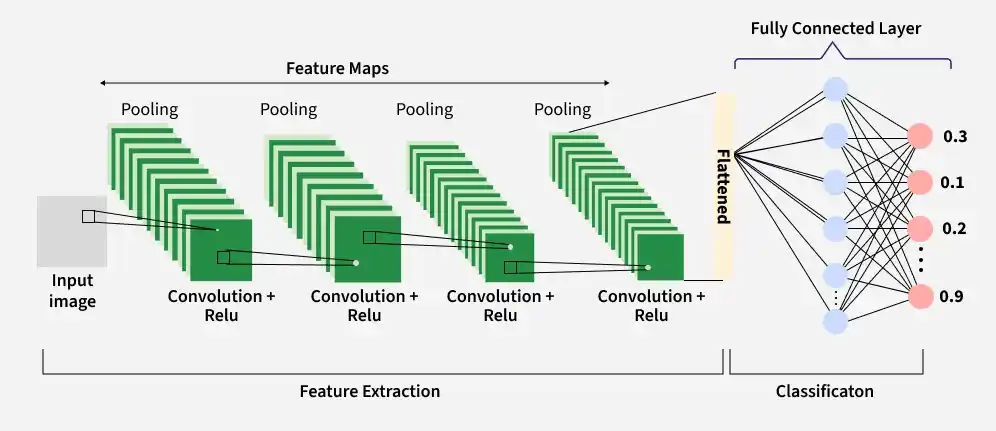
What is a Convolutional Neural Network (CNN)?
A CNN is a specialized neural network designed for images.
Why CNN for wafer maps? Defect patterns are spatial — a “ring” defect forms a circle, a “scratch” forms a line. CNNs are built to detect exactly these kinds of spatial structures.
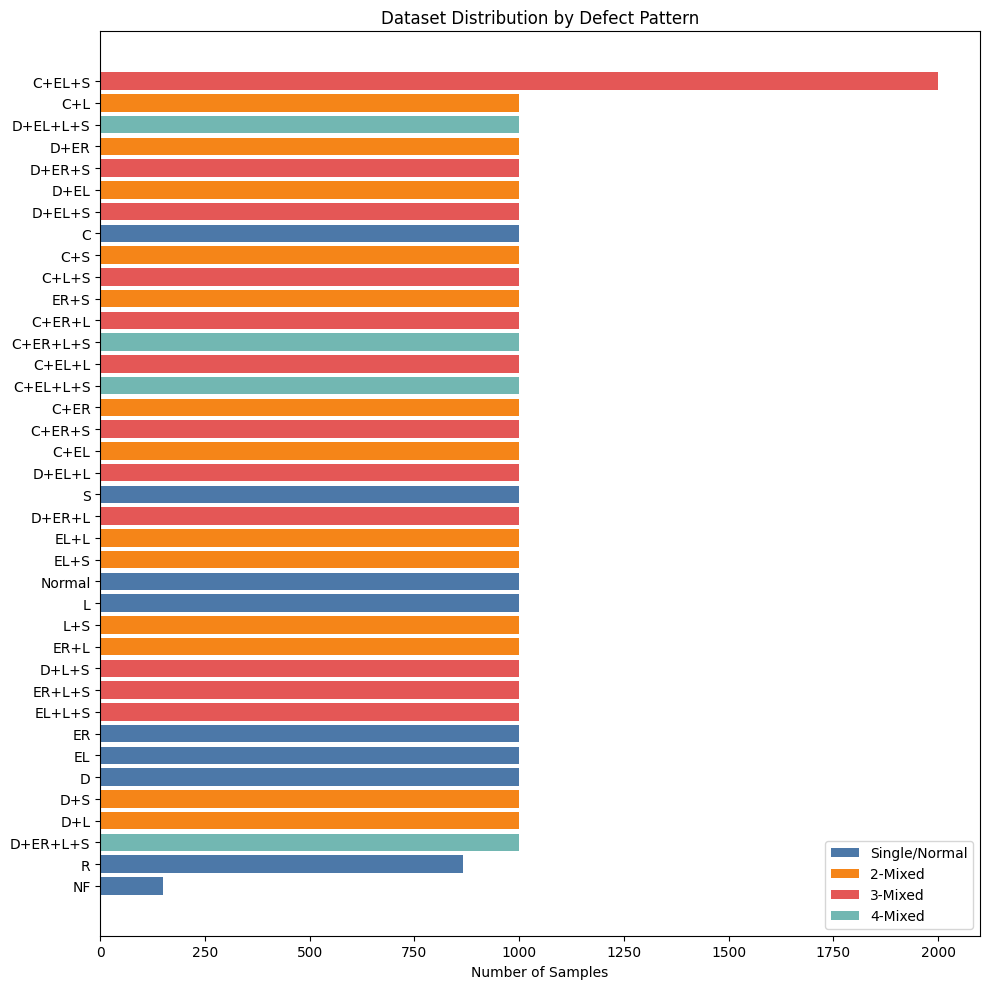
Dataset Overview
Source: Mixed-Type Wafer Map Defect Dataset
38,015 wafer map images
Each image: 52 × 52 pixels
3 pixel states:
0 = blank (no die)
1 = normal die (passed test)
2 = defective die (failed test)
Labels: 8-dimensional one-hot vector (8 base defect types)
38 unique defect patterns (single + combinations)
Data Preprocessing Pipeline
Raw Images 52×52 Values: 0,1,2,3
→
Clean Pixel 3 → 0
→
One-Hot Encode 52×52×3 3 channels
→
Stratified Split 70 / 15 / 15
Stratified Split Ensures All 38 Defect Patterns in Every Set
📦
Dataset 38 patterns Rare (~200)
→
⚠️
Random Split Missing patterns in Val/Test
→
✅
Stratified Split All 38 preserved Train / Val / Test
Split
Samples
Unique Patterns
Train
26,610
38
Val
5,702
38
Test
5,703
38
Per-Label Sample Counts
Label
Train
Val
Test
Center
9,100
1,950
1,950
Donut
8,400
1,800
1,800
Edge_Loc
9,100
1,950
1,950
Edge_Ring
8,400
1,800
1,800
Loc
12,600
2,700
2,700
Near_Full
104
22
23
Scratch
13,300
2,850
2,850
Random
606
130
130
Phase 1: Detecting the 8 Base Defect Types
Output (Threshold = 50%)
Center = 80% ✅ Edge Ring = 85% ✅ Scratch = 80% ✅ Donut = 30% ❌ Edge Loc = 40% ❌ Loc = 10% ❌ Near Full = 1% ❌ Random = 23% ❌
How we validated it
Compared against MobileNetV2 — a model Google trained on millions of images
If our custom model matches or beats it, we know our approach works
Custom CNN outperforms MobileNetV2
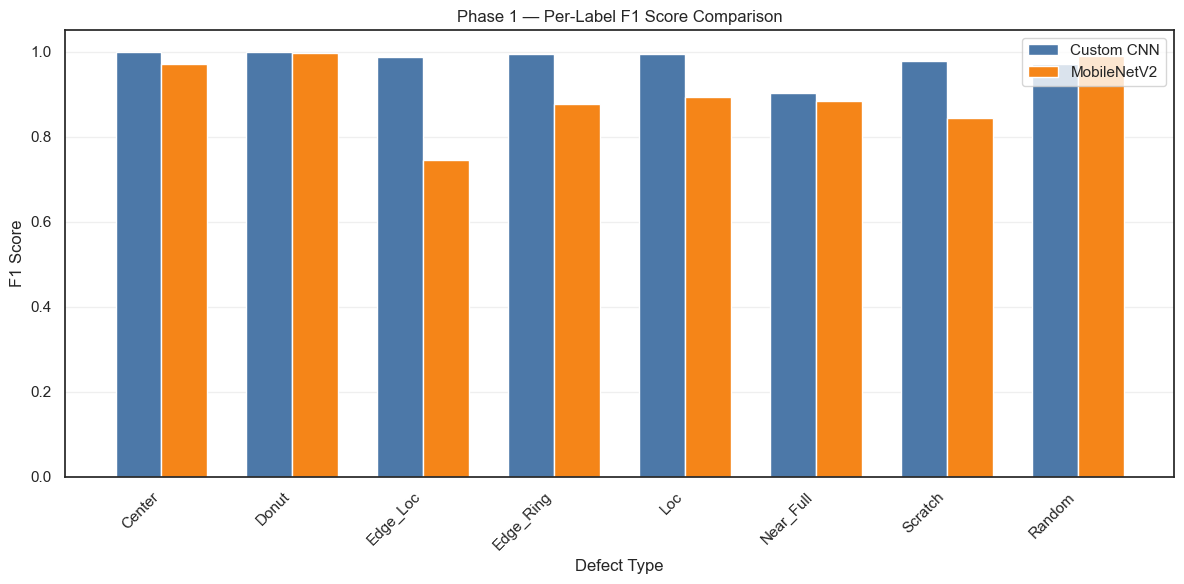
Phase 1 Results
Key observations to highlight:
Both models achieve strong per-label F1 scores
Near_Full is the hardest class (fewest samples ~200)
Custom CNN and MobileNetV2 each have strengths on different defect types
The per-label class weights in focal loss successfully boost rare-class performance
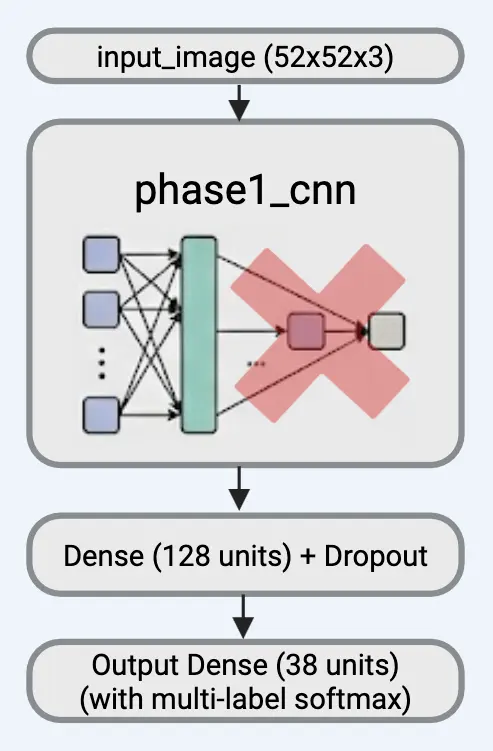
Phase 2: From 8 Base Types to 38 Defect Patterns
We take our trained Phase 1 model (which learned to detect 8 base defect types) and build on top of it to classify all 38 defect patterns.
Transfer learning from Phase 1 Model
Detects 8 base defect patterns (Center, Donut, Scratch, etc.)
→
Phase 2 Model
Classify all 38 defect patterns (base + combinations)
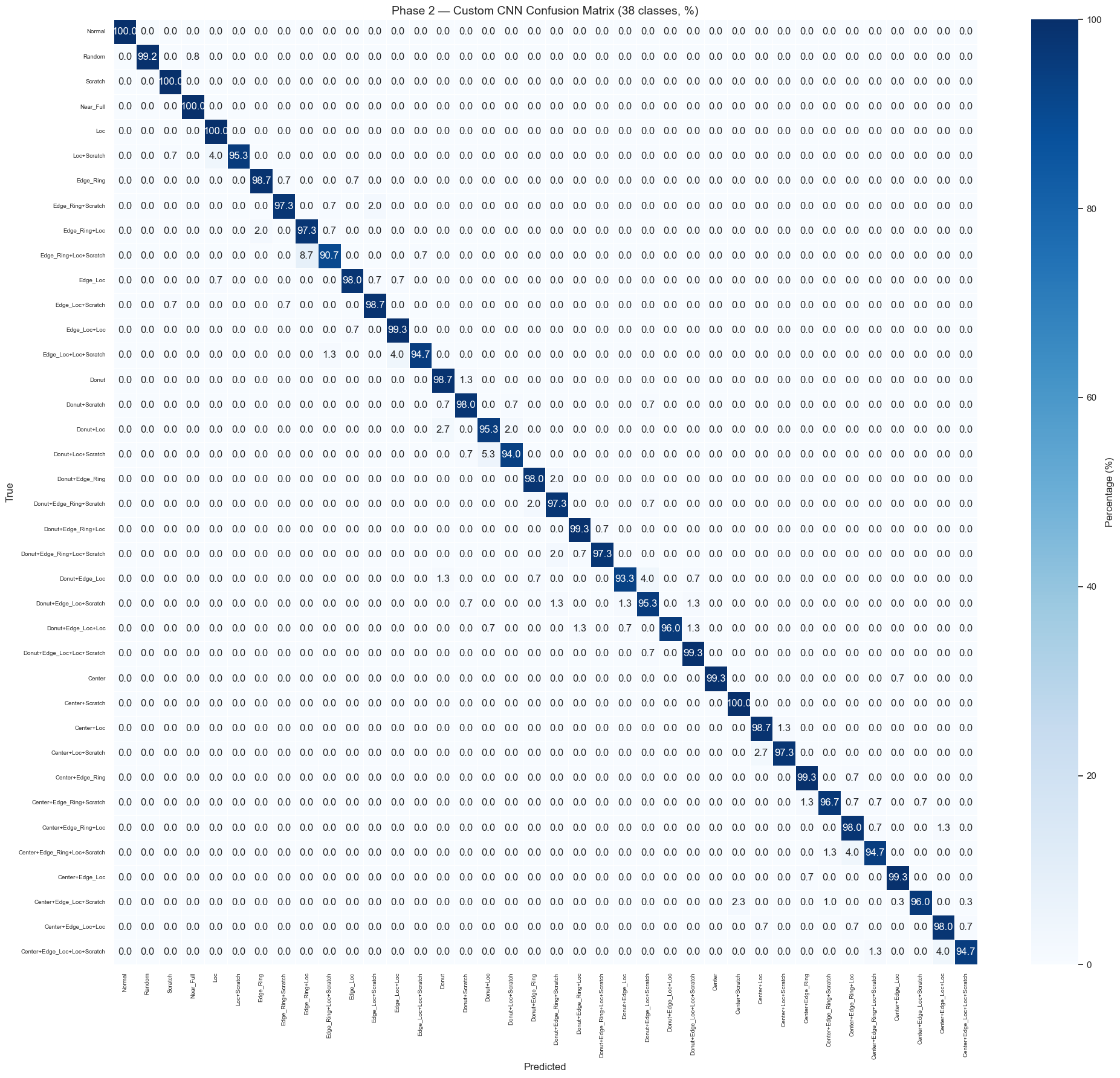
Phase 2 Results — Full Confusion Matrix (38×38)
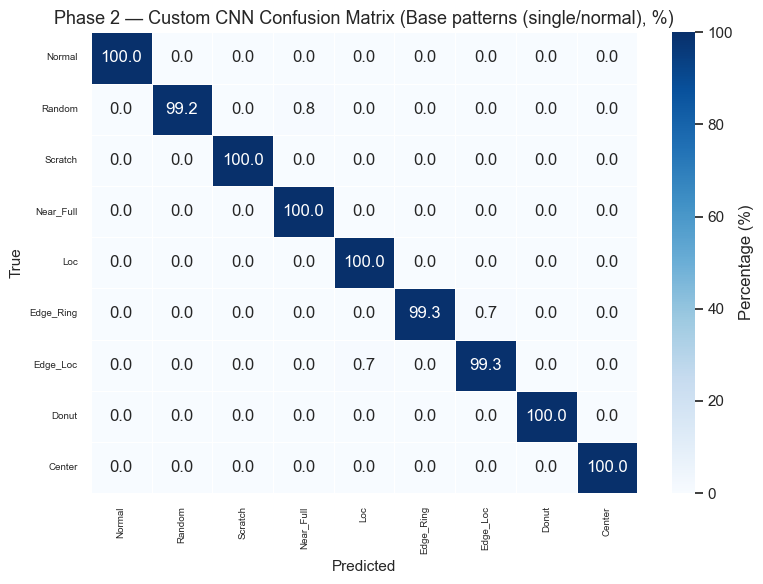
Phase 2 Results — Single / Normal Patterns
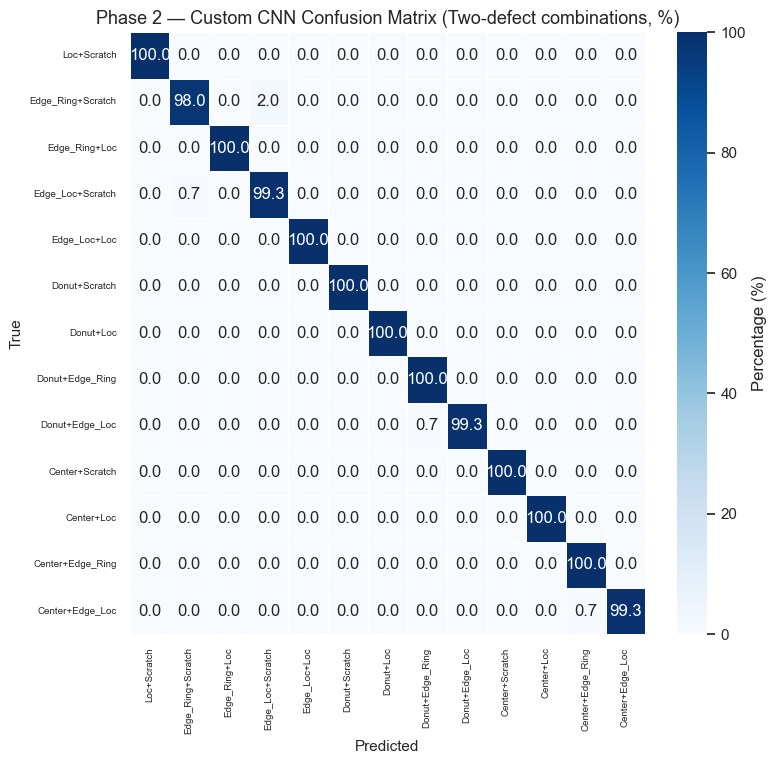
Phase 2 Results — Double Combinations
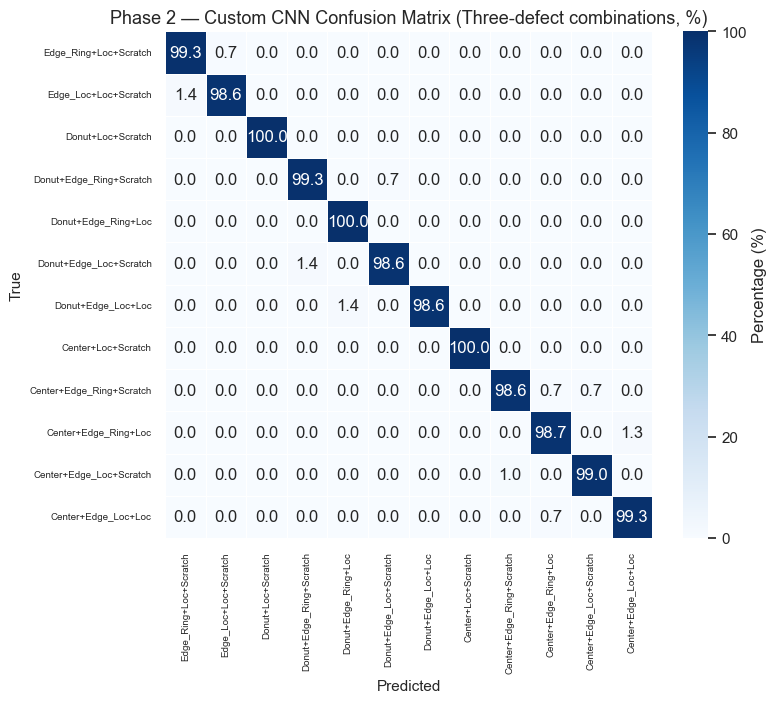
Phase 2 Results — Triple Combinations
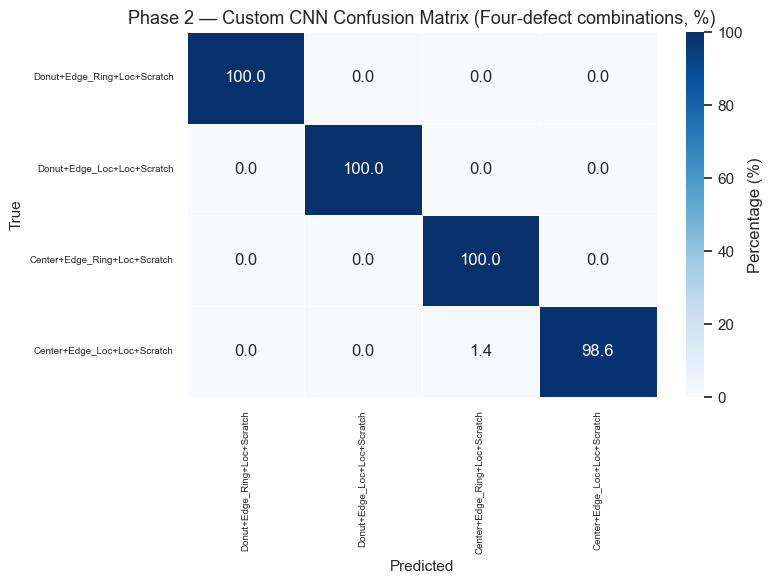
Phase 2 Results — Quadruple Combinations
Final Model Comparison
Phase 1 — Custom CNN (8-label)
Phase 1 — MobileNetV2 (8-label)
Phase 2 — Custom CNN (38-class)
Phase 2 — MobileNetV2 (38-class)
Macro F1
0.9779
0.8998
0.9736
0.9667
Weighted F1
0.9905
0.8847
0.9735
0.9658
Our Custom CNN outperformed MobileNetV2 in both phases
The Phase 2 Custom CNN (38-class) is our final production model — it can identify all 38 defect patterns with 97%+ accuracy
Building our own model from scratch proved more effective than using a pre-trained one for this task
How Accuracy is Measured
Example wafer - Center + Loc + Scratch
Phase 1: 8 Yes/No Questions
Center → 90% → ✓ Yes Donut → 5% → ✗ No Edge_Loc → 3% → ✗ No Edge_Ring → 2% → ✗ No Loc → 95% → ✓ Yes Near_Full → 1% → ✗ No Scratch → 88% → ✓ Yes Random → 4% → ✗ No
GlobalAveragePooling2D — averages each feature map instead of flattening → fewer parameters
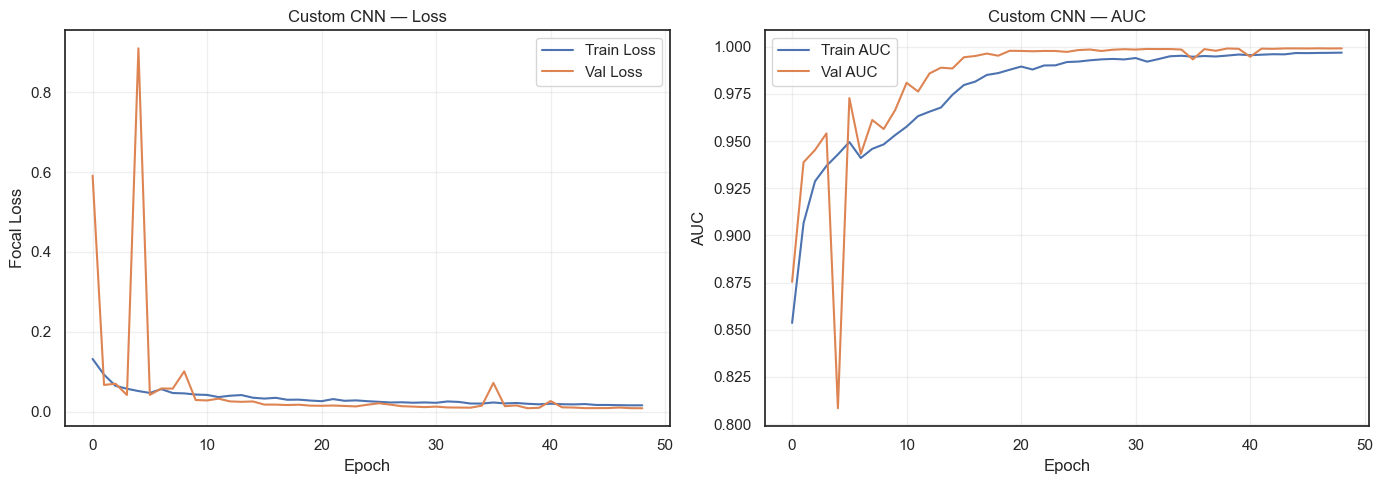
Early Stopping — stops training when validation loss plateaus
Learning Rate - How big a step the model takes when updating its weights. Too big = overshooting; too small = too slow.
What is Transfer Learning?
Transfer learning means reusing knowledge from one task to improve performance on another.
Analogy: Imagine hiring someone who already knows how to identify shapes, edges, and textures, and just teaching them the specific wafer defect categories.
We use transfer learning twice in this project:
Phase 1 → Phase 2: First learn to predict the 8 base defect types, then transfer that learned knowledge to predict all 38 defect patterns
MobileNetV2 → Our task: Reuse a pre-trained model (trained on millions of images) as a feature extractor, and only train a new classification head on top
Two forms of transfer learning:
From
To
Ours
Phase 1 (8 types)
Phase 2 (38 patterns)
MobileNetV2
ImageNet (millions of images)
Wafer defect classification
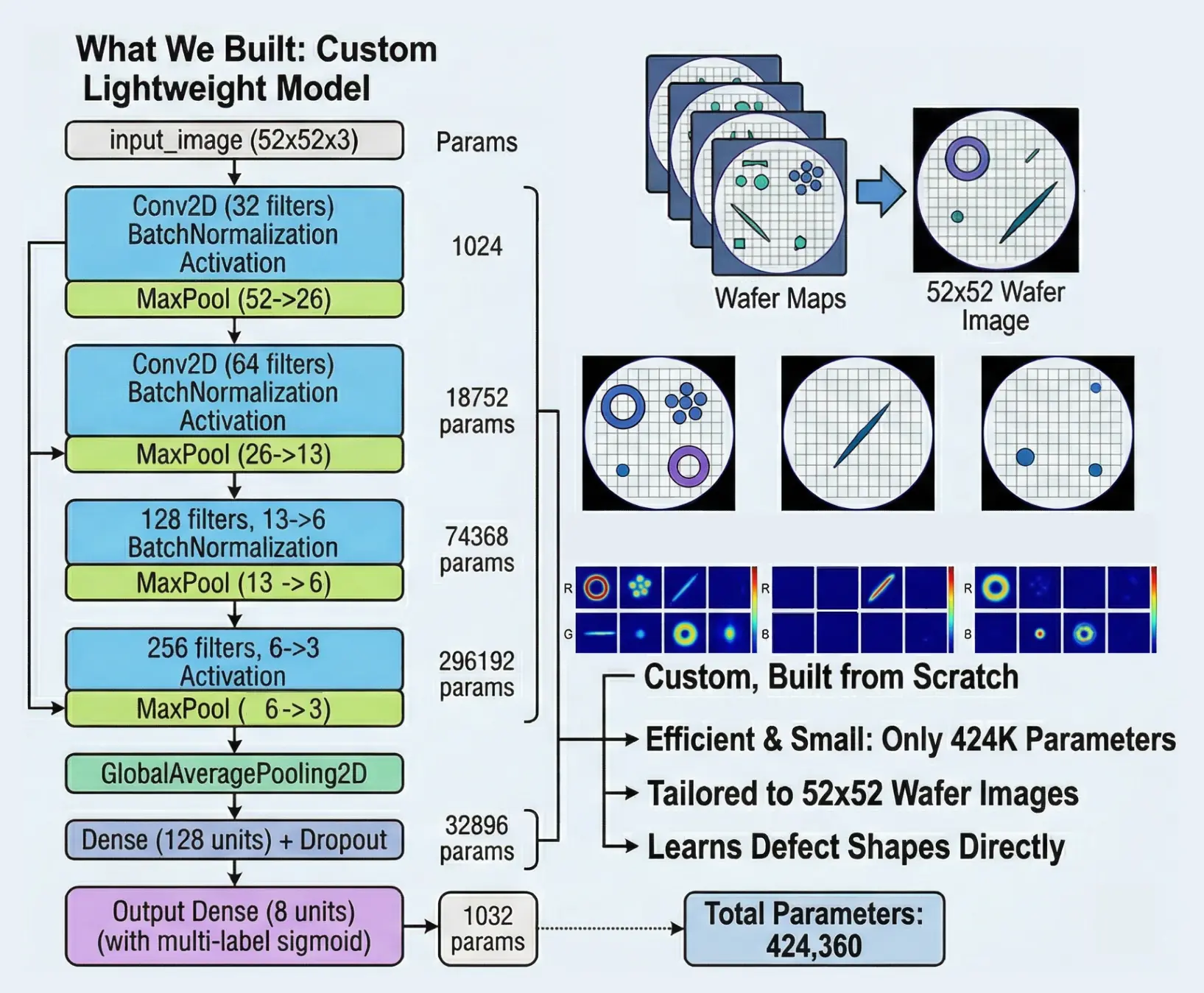
Custom CNN Architecture
Phase 1 Task: Predict which of the 8 base defect types are present (multi-label, 8 sigmoid outputs)
Model: custom_cnn — Total params: 424,264 (1.62 MB)
Layer
Shape
Params
input_image (Input)
(52, 52, 3)
0
conv2d (Conv2D)
(52, 52, 32)
896
batch_norm
(52, 52, 32)
128
activation (ReLU)
(52, 52, 32)
0
max_pooling2d
(26, 26, 32)
0
conv2d_1 (Conv2D)
(26, 26, 64)
18,496
batch_norm_1
(26, 26, 64)
256
activation_1 (ReLU)
(26, 26, 64)
0
max_pooling2d_1
(13, 13, 64)
0
conv2d_2 (Conv2D)
(13, 13, 128)
73,856
Layer
Shape
Params
batch_norm_2
(13, 13, 128)
512
activation_2 (ReLU)
(13, 13, 128)
0
max_pooling2d_2
(6, 6, 128)
0
conv2d_3 (Conv2D)
(6, 6, 256)
295,168
batch_norm_3
(6, 6, 256)
1,024
activation_3 (ReLU)
(6, 6, 256)
0
max_pooling2d_3
(3, 3, 256)
0
global_avg_pool
(256)
0
dense (ReLU)
(128)
32,896
dropout (0.5)
(128)
0
output (Sigmoid)
(8)
1,032
Design choices:
Doubling filters (32→256): Early layers detect simple features (edges), deeper layers detect complex patterns (rings, scratches) — more filters = more capacity for complexity
3×3 kernels: Standard efficient choice — captures local spatial relationships
GlobalAveragePooling over Flatten: reduces parameters from ~2,304 to 256, fighting overfitting
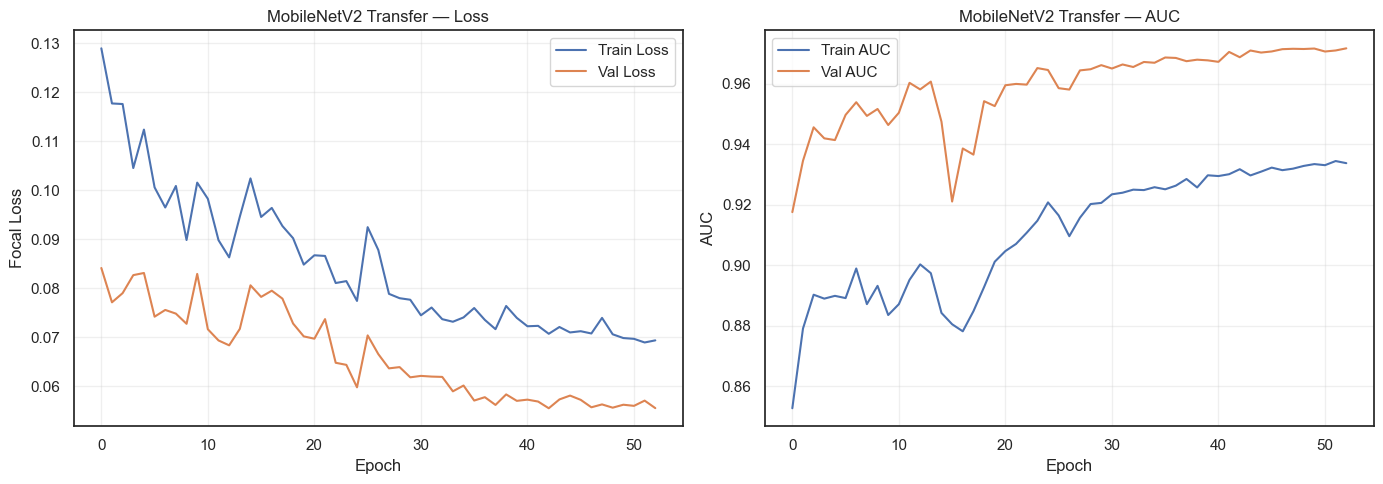
MobileNetV2 Architecture
Model: mobilenet_transfer — Total params: 2,587,988 (9.87 MB)
Layer
Output Shape
Params
input_image (Input)
(52, 52, 3)
0
conv2d_4 (Conv2D)
(52, 52, 3)
12
resizing (Resizing)
(224, 224, 3)
0
mobilenetv2 (Functional)
(7, 7, 1280)
2,257,984
global_average_pooling2d_1
(1280)
0
dense_1 (Dense, ReLU)
(256)
327,936
dropout_1 (Dropout)
(256)
0
output (Dense, Sigmoid)
(8)
2,056
Why MobileNetV2?
Pre-trained on ImageNet → already knows edges, textures, shapes
Lightweight architecture → efficient inference
1×1 Conv projection: Our data has 3 one-hot channels, not RGB — this layer learns the right mapping
Frozen backbone: With only ~38K samples, fine-tuning 2.2M parameters risks overfitting
Phase 2: Two-Stage Training Details
Task: Classify each wafer into exactly one of 38 defect patterns using softmax. We reuse the Phase 1 backbone (frozen) and replace the head with Dense(128) → Dropout → Dense(38, softmax).
Stage A — Head Only
Backbone: FROZEN LR: 1e-3 Epochs: ~30 Train new head only
→
Stage B — Fine-Tune
Backbone: Last 25% UNFROZEN LR: 1e-5 Epochs: ~30 Fine-tune end-to-end
Why two stages?
Stage A (head-only): The new Dense layers have random weights. Training at high LR while backbone is frozen lets them “catch up” without destroying pre-trained weights.
Stage B (fine-tune): Unfreeze the last ~25% of backbone, train at very low LR (1e-5). Adapts features for the 38-class task while preserving prior knowledge.
BatchNorm layers stay frozen — their statistics are from Phase 1 and shouldn’t shift.
Loss:sparse_categorical_crossentropy with balanced class weights
Model Overview
Model
Task
Output
Phase 1 — Custom CNN
8 labels
Sigmoid × 8
Phase 1 — MobileNetV2
8 labels
Sigmoid × 8
Phase 2 — Custom CNN
38 classes
Softmax × 38
Phase 2 — MobileNetV2
38 classes
Softmax × 38
Summary
What We Built
A two-phase deep learning pipeline for wafer defect classification
Phase 1: Multi-label detection of 8 base defect types
Phase 2: Precise identification of all 38 defect patterns
Two architectures: custom CNN and MobileNetV2 transfer learning